
Peoria is in a unique position to support the nation’s AV efforts.
It’s been really interesting to watch the evolving sentiment regarding autonomous vehicles (AVs) over the past two decades. That’s especially true following the great success of the DARPA Grand Challenge in 2007, which brought driverless cars into a mock urban environment, requiring them to perform sophisticated interactions with one another.
It appears that most people are reining in an unfettered enthusiasm about self-driving cars and what they could mean. They are starting to ask really practical, real-world questions about what AVs can do right now and the challenges that must be addressed before the industry can get to a true self-driving car, whether machine-learning models, infrastructure, sensor fusion or simply consumer acceptance. That is not to say that people are less excited. To me, it looks like a more thoughtful, practical approach to moving forward than it did just a few months back.
The New Paradigm
A survey conducted by AAA a couple years ago revealed that only one in five people placed their trust in a driverless vehicle. This survey and other studies also showed that people would get that “warm and fuzzy” feeling once they have the chance to experience added levels of autonomy in a vehicle, whether through smart cruise control, autonomous emergency braking or self-parking ability. However, people are still not confident when it comes to the reliability of a completely autonomous vehicle. Part of it, I believe, is due to human nature—our fixed mindset in trusting traditional methods. In addition, we are always more forgiving when it comes to human errors than those made by machine.
But the reality is that 94 percent of vehicle crashes are due to driver error. In the past two years alone, driver error has killed as many people as the country lost in all of the Vietnam War. For the past 50 years, on average, the number of fatalities in car accidents is equivalent to a fatal Boeing 737 plane crash every day. Worldwide, that number is 1.2 million—or a fatal Boeing 737 plane crash every hour.
Unlike manual driving, the biggest asset of an autonomous vehicle is its consistency—and eventually, its predictability. I say “eventually” because in my mind, the only missing element for full predictability is a unified navigation protocol—the ability for all AVs to communicate in the same “language.” That is not to say that all AVs must use the same navigation algorithm. In fact, navigation nuances would make for a safer and more robust mobility system. (Just think of what would happen if all cars followed the same trail, creating a railing track not suitable for navigation in the long run.) What I am proposing is a unified “messaging” protocol—just like English is used in air traffic coordination worldwide.
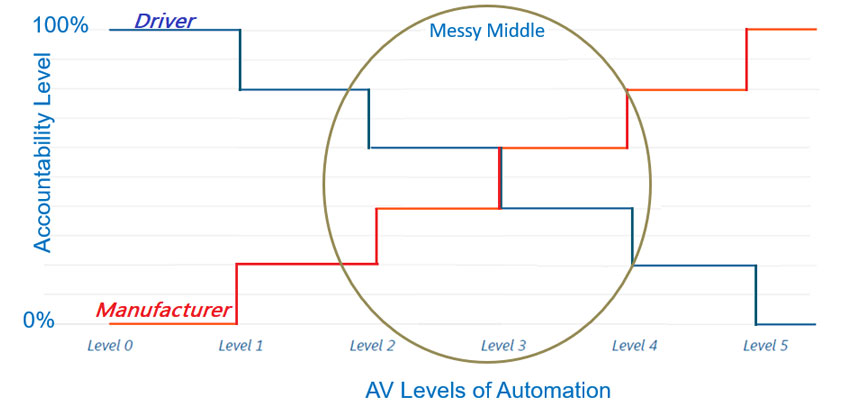
Thinking of an AV as simply an evolution of manual driving is the wrong approach. We need to think beyond that. Legislators are always referring to a taxonomy with detailed definitions for six levels of driving automation, ranging from no automation (level 0) to full self-driving ability (level 5).
But accountability within the “messy middle” levels of automation is not totally clear. For instance, it would be difficult for the Department of Transportation to assess the required human intervention in a driver’s license test at levels three or four. Notice also that as autonomy increases, the liability shifts from the vehicle’s driver or owner to its manufacturer. I believe a common driving messaging protocol would help address both issues. Manufacturers need not worry about disclosing the intellectual property associated with their algorithms, as they would only be sharing and exchanging autonomous vehicle protocol (AVP) messages.
Moving Data on Illinois Roadways
Last October, the State of Illinois introduced an executive order to develop a testing program for connected and automated vehicles. This involves more than just accepting AVs on Illinois roads, which has been allowed for more than a year now. Under the new order, the state has an opportunity to define rules for sharing the common infrastructure between AVs and non-AVs, understand the condition of this infrastructure, and develop a workforce able to service and maintain the technologies behind AVs.
The first thing the state would require is that all AVs share some of the relevant data they collect. For instance, the number of manual (human) interventions needed would depict not only the reliability of the autonomous system, but external factors that would help decide on the need to add or modify rules and regulations (speed limits, additional markings, etc.)
Collecting this data is crucial. Processing the data may be done locally at IDOT, through a third party, or hopefully, through a dedicated Illinois AV center. (There are currently about a dozen AV centers in the U.S., including in Iowa and Wisconsin.)
But it is not just the number of interventions that is important. We must understand whether the intervention was due to a defect in the design of the vehicle, bugs in the software, component failure, defects in manufacturing, inadequacy of the navigation algorithm, or issues with lane markings and road conditions. This would not only be a cost-effective way to assess road conditions—as adequacy or weakness in the infrastructure is continuously assessed by all AV users—but would also help with liability issues.
Does it play in Peoria? Because of the strong local industry already selling and supporting autonomous machinery in mining, construction, agriculture and health systems, Peoria is in a unique geographic location to support the nation’s AV efforts, so long as all see interest in playing together. One obvious advantage of a collaborative effort is the education, training and apprenticeship of a future workforce able to test and evaluate autonomous technologies from an unbiased perspective, giving results to all members and thus saving valuable time and money. iBi
Sam Kherat, PhD, has been affiliated with Caterpillar Inc. for two decades, serving as project manager of the DARPA Grand Challenges in 2004 and 2005 and the DARPA Urban Challenge in 2007. He founded Caterpillar’s Pittsburgh Automation Center, serving as manager from 2007 to 2011, and currently serves as an adjunct professor of mechanical engineering at Bradley University. He is also affiliated with Eureka College.
